RoboHub——物理AI信息聚合站
2026年5月24日 · 1330 字 · 3 分钟 · ai vibe_coding
RoboHub 物理AI信息聚合站:https://robohub.reflector-li.top/
缘起
也就不到半年,Coding Agent 就已经来势汹汹,编码范式也跟着翻了个底朝天。idea 的实现成本正在飞快下降,在这个新范式里,反而更重要的是想法和品味。对完美主义者来说,这是个挺友好的时代——以前那些要反复打磨的细节和点子,现在借助 Agent 很快就能落地。想到这些,还是会忍不住为这个时代激动得睡不着。
WhyNotTv 里徐丹飞对泰然说,光是“让机器动起来”这件事,就足以让他兴奋。我也几乎触电一般记住了这句话。想起小时候想自制电机让四驱车更快,想改造手电筒让小车不用再为续航焦虑,想报考机械因为能做机器人,当然最后去了自动化。凡是能让机器动起来的事,也总是最吸引我。现在,机器智能也正在迅猛展开,而这一切,最后都可以用一个词来概括:Physical AI。importantIdea and taste are all you need.
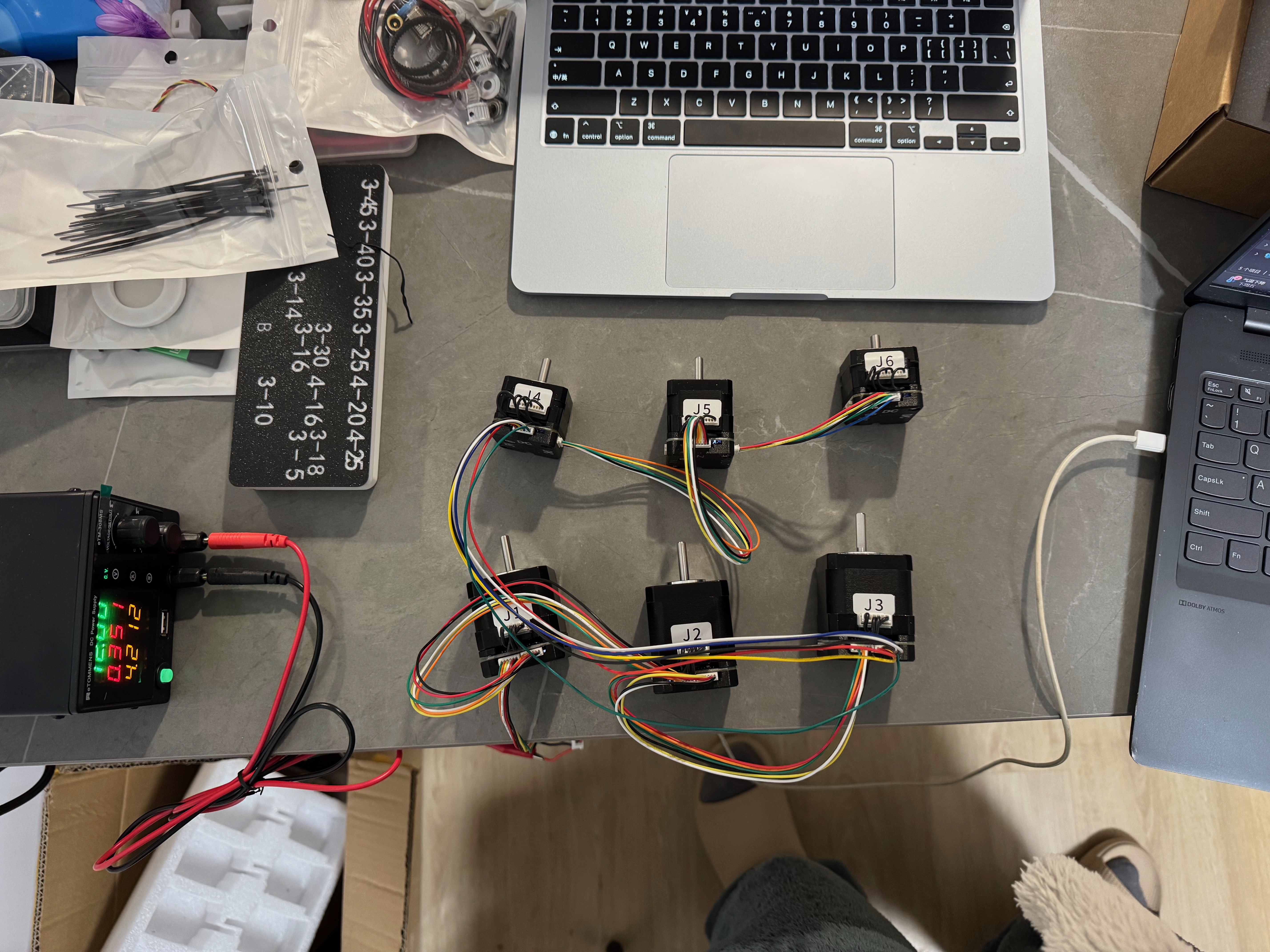
对个人开发者来说,最适合上手的具身实体,非机械臂莫属。于是我终于有机会拥有稚晖君的 dummy。不过从 BOM 开始完整复刻并不符合我现在的需求,所以最后还是决定从电路板开始组装,顺便把整个机械设计流程也熟悉一遍。
软件算法是我现阶段急需补上的一环。从 diffusion policy、$\pi_{0}$ 这样的开创性工作,到现在 $\pi_{0.7}$ 这类 SOTA 算法,我都还没有系统掌握。所以一边补基础课,一边也在持续关注前沿研究。也正因为这样,一个能实时搜集 Physical AI 信息的 Agent,慢慢就在心里冒出来了。
实现
恰逢 Openclaw 掀起 Agent 风暴,我便开始尝试把它做成一个定时搜集、顺手汇报前沿物理 AI 信息的个人助手。说实话,这条路走得并不轻松,国产 LLM 在 Openclaw 上的表现让我不太满意,甚至连一些定时任务都跑不稳。直到重金切换到 gpt5 系列模型后,才真正感受到 Agent 的魅力。
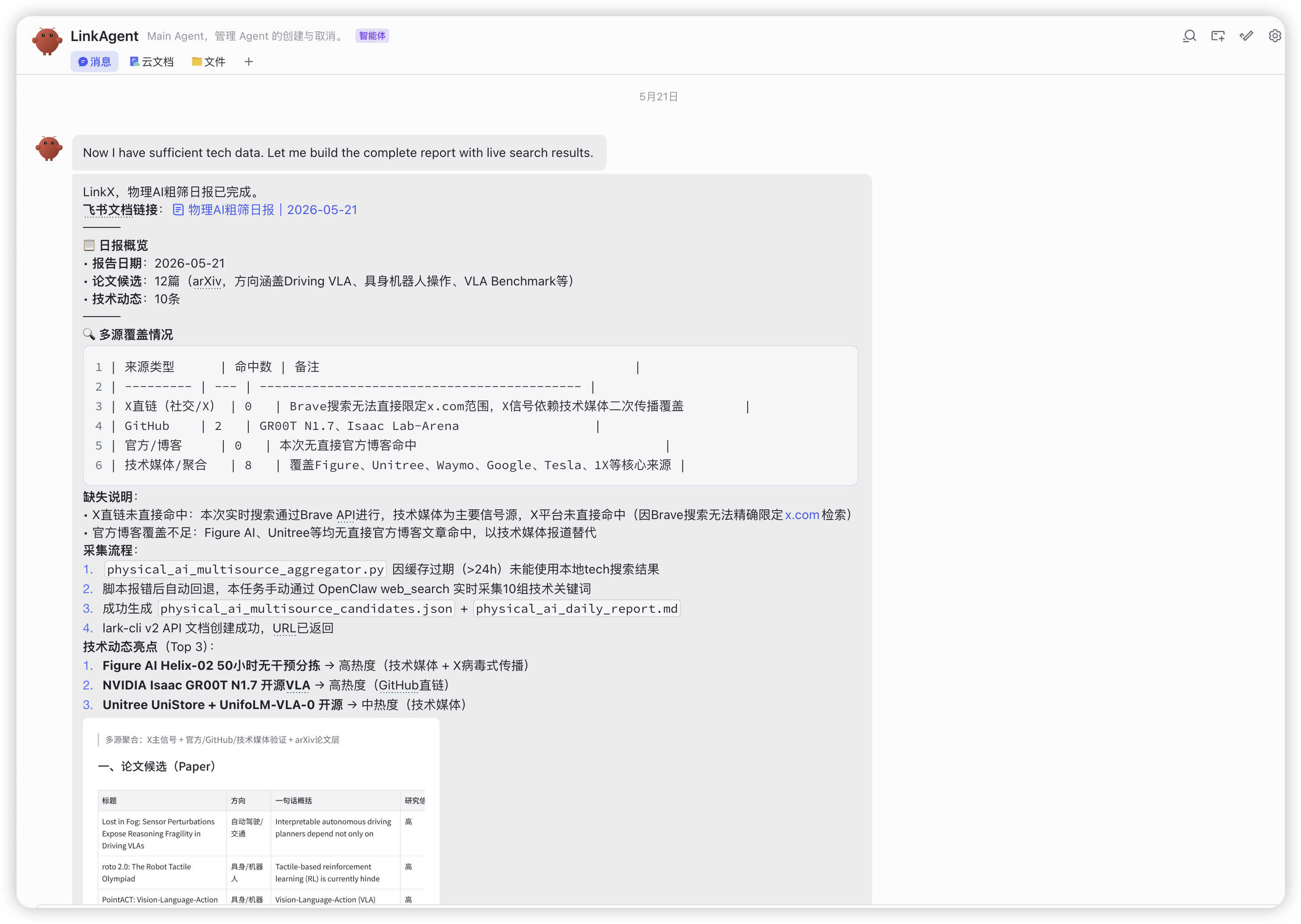
就在我慢慢完善这个 Agent 的时候,卡兹克的这篇 这个封装了我3年自媒体经验的AI热点网站,今天向所有人免费开放 直接给我指明了方向。他做的那个网站,除了关注主题不一样,几乎就是我想要的样子。于是我最终决定放弃纯 Agent 方案。手头刚好也有服务器,那干脆直接做成网页,自己能用,也能给感兴趣的朋友看看。
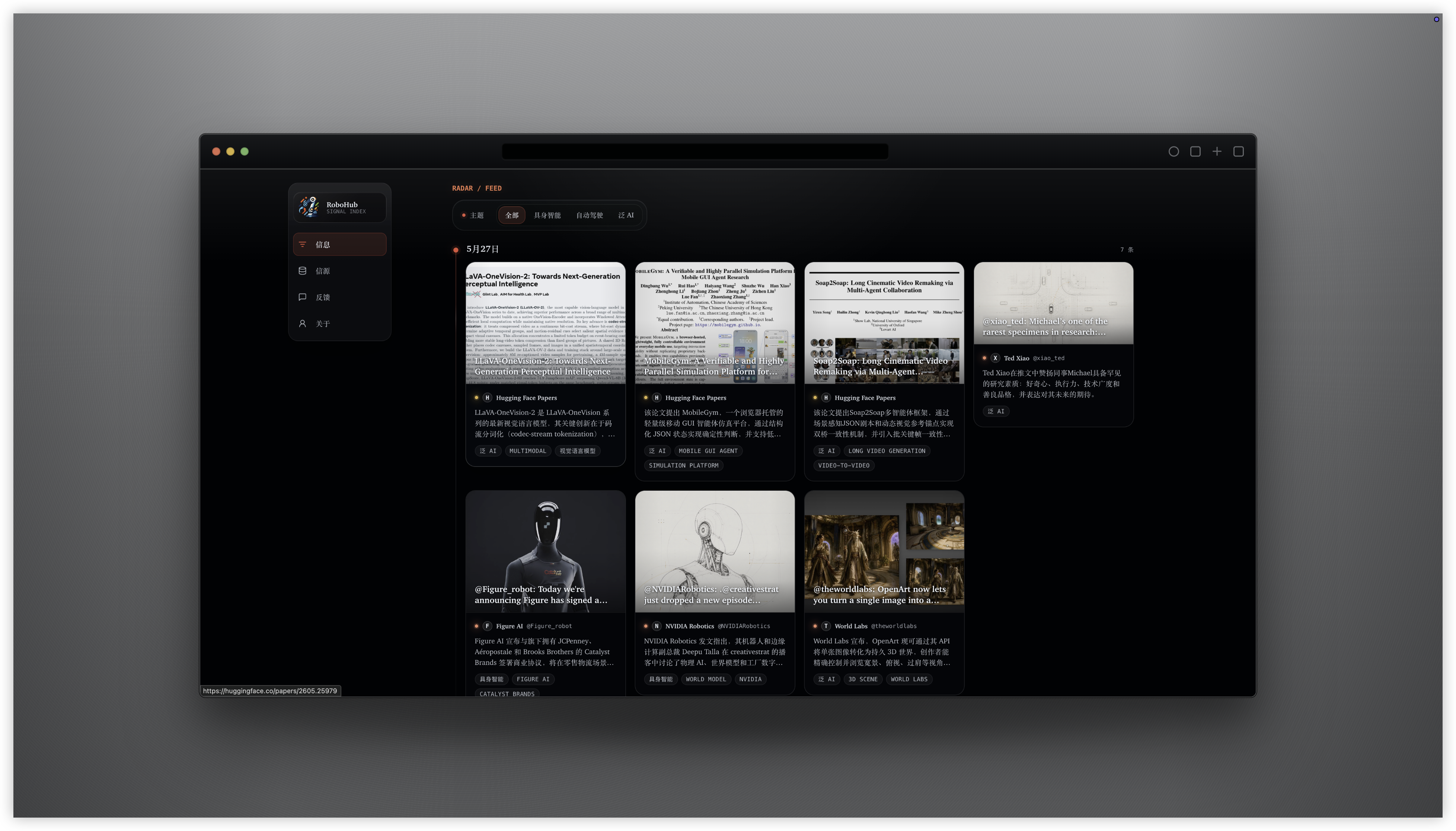
我决定把站点命名为 RoboHub,主要聚合来自前沿 lab 或公司的物理 AI 相关工作。核心点大致如下:
- X 作为主要信息源,Hugging Face 和 lab RSS 作为辅助。 因为 X 上的资讯更新最快,而且信息之间关联性很强,很多 Robotics 研究员也喜欢在上面宣传自己的工作或分享想法。最开始我尝试了各种白嫖抓取 X 的方案,但都被老马防住了,最后还是老老实实花钱上 API。这个站是需要持续投入维护成本的,希望也能顺手为社区创造一点价值。
- AI 筛选机制。 让 LLM 做信息质量判定其实很直观,但得换个思路,不直接看整段内容,而是拆成多个维度,比如主题贴合度、重要性、参考价值,再分别打分,过滤掉一些低价值信息。
- UI 设计。 作为一个形色至上的工程师,我实在接受不了 AI 一把梭哈出来的前端。当我在思考该怎么更好地展示信息时,梦里的小红书给了我灵感。经过多轮迭代后,目前初版形态已经稳定下来,我自己觉得还挺不错。
- 反馈机制。 高质量信息源才是核心。我会持续补充信息源,也专门做了反馈页面,希望有缘人可以一起补全。
这次高举高打,算是我认真研究具身的第一个动作。我想通过设定一些有趣的目标来带着自己学,下一步就是先把手子动起来,整点活。客官敬请期待。